

简单介绍一下线控制动是怎么回事,分析线控制动技术类型、结构和优缺点及研究现状,阐述其功能特点和工作原理。在剖析电子液压制动系统组成架构的基础上归纳出电子液压制动系统的液压力控制架构,以控制变量和控制算法为突破口,从主缸液压力控制和轮缸液压力控制这两个层面分别对国内外的研究进展进行综述,对能够应用于电子液压制动系统上的电磁阀特性做多元化的分析,对其控制方式来进行研究,提出对于电子液压制动系统液压力控制的发展展望;根据电动智能汽车对制动系统提出的新要求,设计了一款新型混合线控制动系统HBBW。
基于HBBW开发了前后轮制动力精确跟随控制算法,并进行了HiL试验验证。前轮EHB和后轮EMB系统均能达到设计的响应要求,较好跟随目标压力;通过整车制动力分配算法,能实现对前后车轮制动力的精确调节,满足整车制动力分配的需求;对一种线控制动系统踏板感觉模拟器进行计算分析和试验验证,确定了模拟器常闭电磁阀过流孔径是影响踏板行程特性曲线偏离的重要的因素. 重新设计了一种液控开闭阀,该阀由原踏板模拟器常闭电磁阀控制,所设计的液控开闭阀可提高踏板模拟器回路的通流能力. 利用 AMEsim仿真模型完成参数选型并进行了装车试验,仿真及试验结果均表明该方案可获得良好的踏板感曲线精度,同时具备开发方便、降低电磁阀负荷的特点;汽车安全技术的研究与开发是当今世界汽车技术的重要发展趋势,汽车制动系统对车辆的安全行驶起着至关重要的作用。采用线控技术构建有关汽车安全性能的电子控制管理系统,可极大地提高驾驶的安全性、可靠性和稳定性。
线控制动给汽车结构和制动性能带来根本性变革,相对传统制动系统具有不能够比拟的优点,其研究与应用对汽车安全性、可操纵性、舒适性以及节能环保都将起到重要的作用。然后简述了在当前新形势下线控制动系统面临的主要需求和未来发展趋势。
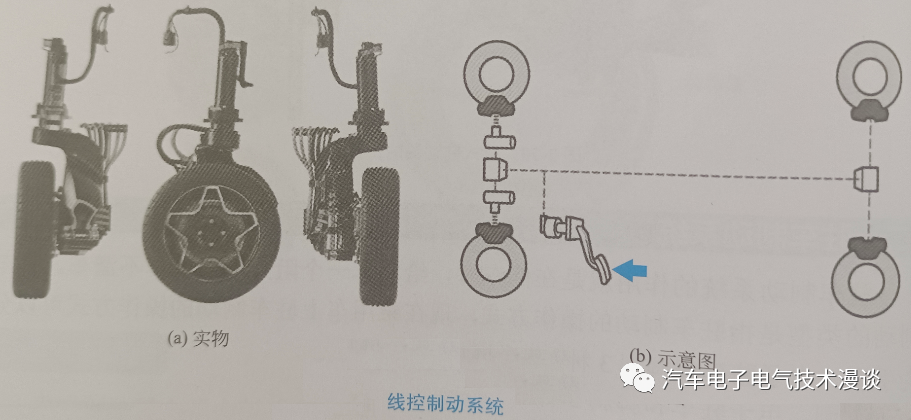
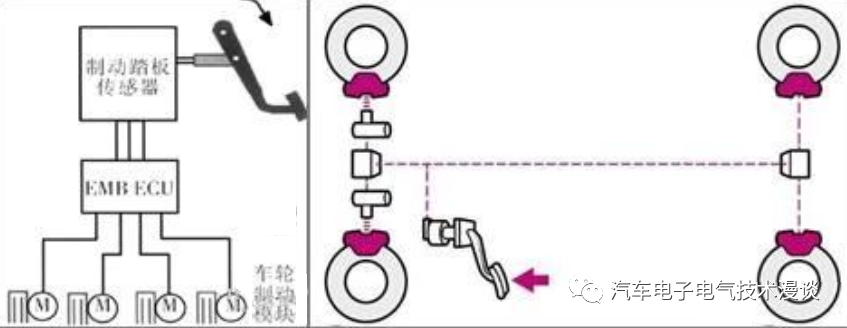
线控技术(X-by-Wire)”就是“电控技术”,从航空技术领域引入,其中,“X” 代表汽车中传统上由机械或者液压控制的各个功能部件,线控制动属于线控,用制动(Brake)代替X就称线控制动(Brake-by-Wire)。机械连接慢慢地减少,制动踏板和制动器之间动力传递分离开来,取而代之的是电线连接;将原有的制动踏板用一个模拟发生器替代,通过制动踏板位置传感器监测驾驶员的制动意图产生、传递制动信号,将制动踏板机械信号转变为电控信号,并将信号传递给控制管理系统和执行机构,以电控模块来实现制动力,并根据一定的算法模拟踩踏感觉反馈给司机;电线传递能量,数据线传递信号,所以这种制动叫做线控制动。如果制动踏板仅仅只连接一个制动踏板位置传感器,踏板与制动系统之间没有一点刚性连接或液压连接的,都可以视为线控制动系统,如下图。
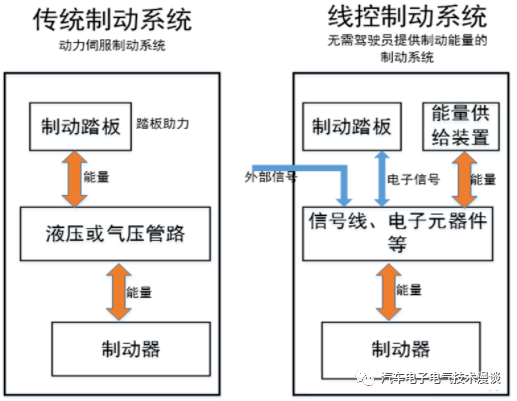
大部分小型车都采用传统的制动系统液压制动,里面通过制动踏板提供能量,而线控制动系统有专门的能量供给方式,一般来说是通过轮边的一些电机直接驱动进行这些工作。里面传统的制动系统液压和气压管路没有了,这是它们最大的区别,比较如下图所示,
线控制动使用一个制动踏板传感器,监测踏板的位置;踏板的移动被传递给ECU,ECU与四个直流电动机相连,每个轮胎上有一个;根据制动踏板的踩踏情况,ECU命令电机进行制动。由于这些电机是相互独立的,它们能对每个轮胎施加不同的压力,这有助于使用别的技术,如ABS,TCS,ESC等,ECU通过线控液压制动系统,使四个轮缸完成不同的任务,比如增压,减压或者保压,从而完成车辆的制动,或者稳定性控制;ECU还使用来自其他传感器的数据,如轮速传感器和横向加速度传感器,以获得对要多少制动的完美概念。由于制动是汽车中很重要的一部分,它的故障是相当具有破坏性的。因此,线控刹车系统也使用了一个备用刹车系统,以确保汽车能够一直刹车。这种冗余系统是L3以上无人驾驶功能必须要具备的。
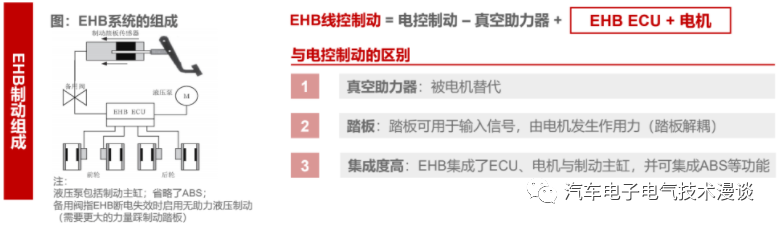
EHB是Electronic Hydraulic Brake的简称,是从传统的液压制动系统发展来的,但与传统制动方式有很大的不同。由于液压管路发展了上百年,现阶段已经是非常成熟可靠的系统,并且也能较好的控制成本,是在它的基础上,用电子器件替代了一部分机械部件的功能,将传统液压制动技术的动力源替换为电子控制管理系统,只用了一个伺服电机和一套控制器为EHB系统提供动力,取消了传统制动系统中的真空供给部件和真空助力部件。制动踏板不再与制动轮缸有任何机械连接,采用的是电传刹车踏板,即刹车踏板与制动系统并无刚性连接,也无液压连接(如果有也只是作为备用系统),而是仅仅连接着一个制动踏板传感器,用于给电脑(EHB ECU)输入一个踏板位置信号。使用制动液作为动力传递媒介,控制单元与执行机构布置比较集中,并且使用制动液作为制动力传递的媒介,有液压备份系统,那么称之为集中式的湿式的制动系统,也称电子液压制动系统。
与传统制动系统相比,最大的不同之处在于:首先用电子系统来提供动力源,它以电机为动力源,解决了传统的真空助力器制动系统的真空依赖问题;其次它引入了电控单元和多种传感器,用电子元件替代传统制动系统中的部分机械元件,即用综合制动模块取代传统制动系统中的助力器、压力调节器和ABS模块,使得制动系统实现电控化,可作为智能驾驶的关键执行器。同时保留了成熟的液压部分,可以在电子助力失效时提供备用制动,确保车辆安全。
EHB系统基本功能是提升老旧制动体系的性能,将电子系统和液压系统相结合整合到一起,是一种介于传统的制动系统与电子机械制动系统之间的制动系统, 兼具这两种系统的特点, 系统中既有效把握了传统液压控制管理系统的结构, 同时又应用了电子控制管理系统的主要内容。新型的线控电子液压制动系统应运而生,是一个先进的机电液一体电控化系统,其控制单元及执行机构布置集中。传统车用12V电源即可驱动EHB系统,无需设计新的供能系统。
EHB系统虽实现了线控制动功能,但并不完全移除液压系统,备用系统中仍然包含复杂的制动液传输管路,使得EHB并不完全包含线控制动系统产品的优点,EHB系统也因此被视为线控制动控制BBW技术的前期产物。
电子机械制动系统EMB是Electronic Mechanical Brake的简称,最早是应用在飞机上的,如美国的F-15战斗机就采用了EMB制动器,后来才慢慢转化运用到汽车上来。EMB与传统的制动系统有着极大的差别,与常规的液压制动系统截然不同,完全不同于传统的真空助力液压制动系统,基于一种全新的设计理念,完全摒弃了传统制动系统的制动液及液压管路等部件,取消了使用一百多年的刹车液压管路,完全抛弃了液压装置,使用电子机械系统替代,其能量源只需要电能,因此执行和控制机构需要完全的重新设计,EMB作为纯机械系统,执行机构通常直接安装在各个轮边,将电机集成在制动钳上,踏板产生制动信号直接输入到制动钳,输入与终端执行之间的部件全部简化。没有制动液也没有液压管路,由电机驱动产生制动力,每个车轮上安装一个可以独立工作的电子机械制动器,如果四个轮胎需要制动的话,就需要四个电机,也称为分布式、干式制动系统。采用电子控制,使用控制模块控制伺服电机进行制动,通过伺服电机直接作用于轮缸,直接给刹车碟施加制动力。这有点像电子手刹,但是与电子手刹最大的不同是它需要能够产生足够大的制动力并且制动线性要高度可调,响应要非常迅速。
汽车的线控制动系统涵盖面广,最重要的包含了控制装置、传动装置等多项构成,通过全面控制有关的制动系统,并联合先进的制动器,就能够在不同的制动器中,单独来控制,完成独立操作。而制动踏板和制动器之间没有采用机械进行连接,而是用电线关联,通过电线将两者间的能量、信号等进行传送,不仅提升了传输效率,还能提高汽车的整体性能,有效保障了驾驶过程中的安全。
线控制动系统包含传统制动技术,是基于动力学、运动学、电控等多学科融合技术,技术壁垒较高。掌控着无人驾驶的底盘安全性和稳定控制,只有拥有足够好的制动性能(包括响应速度快、平顺性好等),才能为行驶安全提供良好保障。这一系统结合了汽车电子技术和网络信息技术, 它的应用推动了汽车全自动化水平的提升, 同时在汽车的智能控制方面有重要的作用, 给其创造了良好的条件。
线控制动可以缩短制动距离,软件定义踏板感,满足智能驾驶需求,符合集成化、电子化趋势。即使整车EEA变革,制动单元ECU、芯片对安全稳定性能要求严格,将长期独立存在。
在无人驾驶典型的感知-规划-执行设计范式中,线控制动属于执行层部件,为感知层开放了接口。上一代制动系统制动力的输入源必须是驾驶员,而线控制动既可以由刹车踏板控制,也可以脱离人力,由ECU控制主动建压。因此,线控制动作为线+级别无人驾驶的必备条件,部分L2-L2.5级别无人驾驶车型也装配了线)更快更精的刹车性能,软件定义踏板感
电信号传递快于机械连接,为自动驾驶提供更高级别的安全守护。常规制动系统响应时间为300-500毫秒,布雷博的线控制动系统响应时间只有90毫秒,线控制动距离相应缩短。
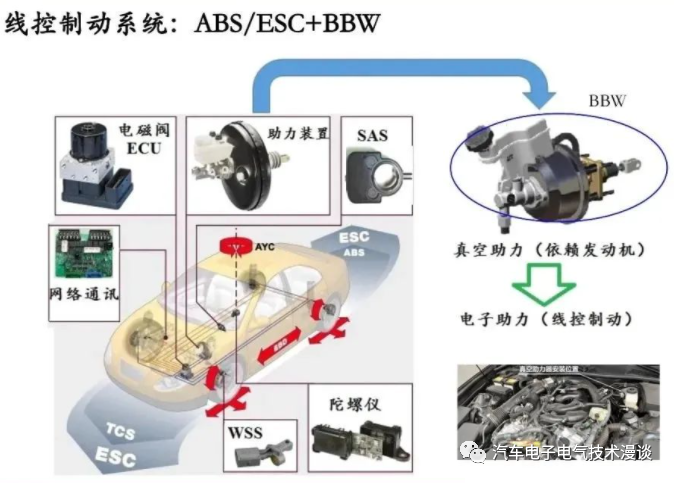
由于防抱死制动系统(ABS)、车身稳定控制系统(ESP)等逐步产生,线控制动系统慢慢在传统的制动系统上发展起来。
L2时代的线控制动可大致分为燃油车、混动、纯电三大类,燃油车基本都采用ESP(ESC)做线控制动;混动车基本都采用高压蓄能器为核心的间接型EHB(电液压制动);纯电车基本都采用直接型EHB,以电机直接推动主缸活塞。
L3+级别无人驾驶为线控制动提供明确的市场需求,线控制动是无人驾驶的标配。线控制动属于执行层部件,既可以由刹车踏板控制,也可以脱离人力,由ECU控制主动建压。功能相似的ESP车身稳定系统只能作为紧急备用方案,要实现L3+级别无人驾驶必须开发一套新的电子助力装置作为常用制动,并配合ESP、EPB、RBU等形式的电子安全冗余。

ESP(Electronic Stability Program)车身稳定系统有主动刹车的诉求,因此线控制动系统的结构在ESP中也有所体现。但即便经过了几十年发展,ESP仍不能作为常用刹车方案,只能作为紧急备用方案,无法兼容线控制动功能。博世ESP系统的最大减速度为0.4g,低于常规刹车0.6g-0.8g的要求。并且ESP反应速度较慢,所需刹车时间为ibooster的三倍,每次使用都可能会导致寿命急剧下滑,频繁使用不超过一个月便会报废,因此有必要重新开发一套电子助力装置。
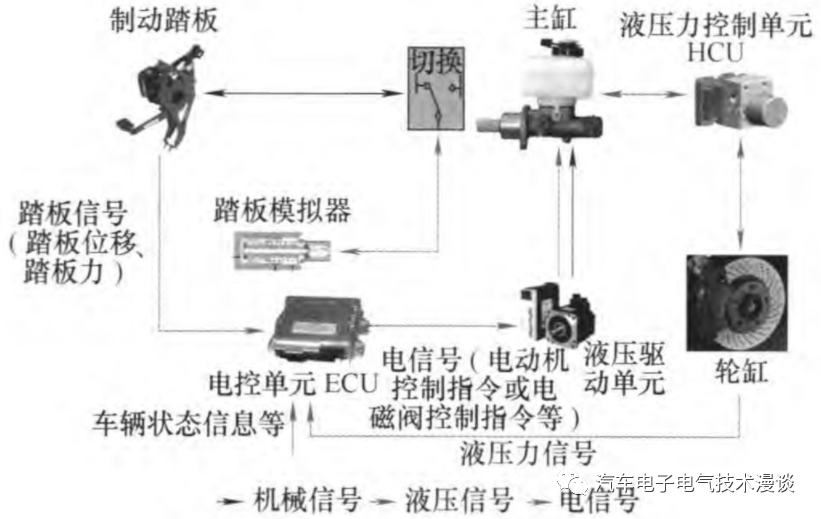
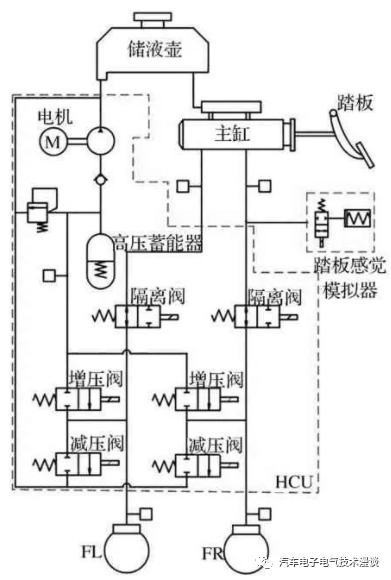
2.电子液压制动系统(EHB) 典型EHB由制动踏板位移传感器(电子踏板)、电子控制单元ECU、液压执行器机构(液压泵、备用阀和制动器)等部分所组成。电子踏板是由制动踏板和踏板传感器(踏板位移传感器/角度传感器 )组成。制动踏板位置传感器用于检测踏板行程/踏板转角,然后将位移/转角信号转化成电信号传给ECU,实现踏板行程/转角和制动力按比例进行调控。如下图所示。
如上图所示,电子液压制动系统共分成四大部分:制动踏板单元、液压调节(驱动)单元、制动执行单元、电子控制单元(控制管理系统)。
(1)制动踏板单元包括制动踏板、制动液罐、制动主缸、踏板行程传感器、制动踏板模拟器等,负责为驾驶员提供合适的制动踏板感觉,同时获取驾驶员意图。在普通制动情况下,制动踏板单元不再向车轮制动器提供制动能量,其主要用来利用踏板行程传感器采集驾驶员制动意图以及利用制动踏板感觉模拟器模拟驾驶员的制动感觉。
(2)液压驱动单元包括「电动机 + 减速机构」、「液压泵 + 高压蓄能器」等形式。液压调节单元包括布置在发动机舱内的液压调节器、制动管路、车轮制动器和安装在蓄能器和每个车轮制动器处的压力传感器。液压调节单元最重要的包含进液阀、出液阀、平衡阀、隔离阀、气囊式蓄能器以及电机泵等。相比于电子稳定性系统ESP的液压调节单元,EHB在制动主缸与液压调节器连接处增加有隔离阀,用于隔断制动踏板单元与液压调节单元之间的物理连接;同时使用高压蓄能器储存来自电机泵的高压制动液并向车轮制动器提供制动能量,以实现在普通制动下的主动制动功能。电机泵只在蓄能器压力降低到规定极限时,才驱动电动机使液压泵工作。
由于电动汽车制动主缸最高建压需求往往超过15MPa,因此在采用电动机作为液压压力动力源的电子液压制动系统中,均需要加装减速增扭机构,以增大电动机的最大输出转矩,减小电动机体积,节约成本。
1)「电动机+减速机构」负责将电动机的力矩转化成直线运动机构上的推力从而推动主缸产生相应的液压力;
2)「液压泵+高压蓄能器」通过高压蓄能器的高压能量来提供主缸液压力或轮缸制动力以实现主动调节。
该系统通过制动踏板单元获取制动驾驶意图从而向整车控制器发送指令,以控制高压蓄能器、电磁阀和泵产生相应的液压力;
(3)制动执行单元包括主缸,液压管路,轮缸等。这些机构跟传统制动系统的结构保持一致,将推动主缸的推力转化成制动器的液压力,最后通过摩擦力作用在制动盘上产生相应的制动力矩。
(4)控制管理系统包括电控单元(Electric Control Unit,ECU)、液压力控制单元(Hydraulic Control Unit,HCU)、液压力传感器、踏板力传感器以及踏板位移传感器等;液压力控制单元(HCU)是液压力控制的核心单元。电子控制单元与液压调节器集成在一起,主要是通过CAN总线接收来自传感器信号并向液压调节器发出控制指令。
1)HCU 用以精确调节轮缸液压力;HCU 的主要元件是电磁阀,轮缸液压力控制的底层控制就是电磁阀控制。目前用于 HCU 的电磁阀主要有三类:开关阀、高速开关阀和线性阀。
①开关阀是 HCU 的核心执行部件之一,利用快速的开启和关闭动作来改变液体的流向和平均流量。开关阀的开关机理是通过阀口两端压力差产生的液压力和液动力、被压缩弹簧的回位力、电磁线圈产生的电磁力以及阀芯运动过程中所受的制动液粘性阻力、机械摩擦阻力的合力来驱动阀芯移动从而进行阀口的开关动作。
②高速开关阀与传统开关阀的工作原理相同,都是在开、关两种状态之间切换来实现液流的通断。不同之处在于高速开关阀响应速度较快。
③线性阀是解决高速开关阀低频控制下存在缺点的一个有效途径。线性阀的主要特征是节流面积可调,需调控电磁力。其设计思路是控制阀口开度,压力增益可控可调。同一种孔径的产品覆盖面更广,通用性更强,制造成本更低;而且还能抑制噪声,提高制动的舒适性。电磁阀控制本质上是流量控制。
2)液压力传感器作为反馈单元将液压力实时反馈到整车控制器里,用作控制算法的输入量;
3)踏板力传感器和踏板位移传感器用来检测驾驶员的踏板信号,从而获得驾驶员意图。
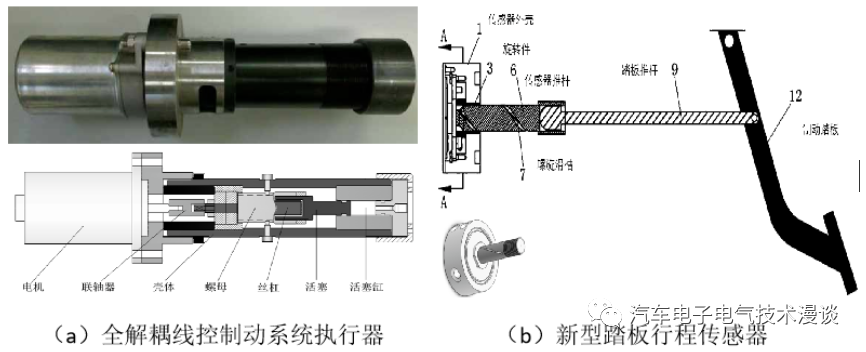
是一种基于液压传递的全解耦线控制动系统。主要由电机、减速増扭机构(齿轮、丝杆、螺母)、制动主缸、前后壳体、踏板推杆、行程传感器、液压力传感器、电机控制器等组成。项目成果所涉及到的新型踏板行程传感器将踏板推杆的平动转化为传感器内部器件的转动,基于此,能够最终靠在推杆上设计不同曲率的沟槽,将传感器设计为非线性、线性以及不同的物理精度。所涉及的全解耦电子助力器,制动踏板推杆和制动主缸活塞之间无机械链接,属于智能制动执行器,满足特种无人驾驶车辆对制动系统主动制动的功能要求、取消了传统制动系统对发动机真空度的依赖、具备配合电动车实现制动能量回收的功能。
解耦原理:踏板推杆与制动总泵推杆之间无连接,制动系统的动作依靠电信号或者行程传感器信号来控制实现。
工作原理:当驾驶员踩下制动踏板时,踏板推杆向前移动,推动行程传感器内部旋转件转动,传感器记录旋转部件的转角,根据推杆滑槽曲率计算出踏板推杆实际行程,识别驾驶员制动意图。通过电信号传递给系统控制器,控制器控制执行器电机动作,电机驱动丝杆和螺母,讲转动转化为平动,推动制动缸活塞建立液压制动力,作用在轮边制动盘上,产生制动力。
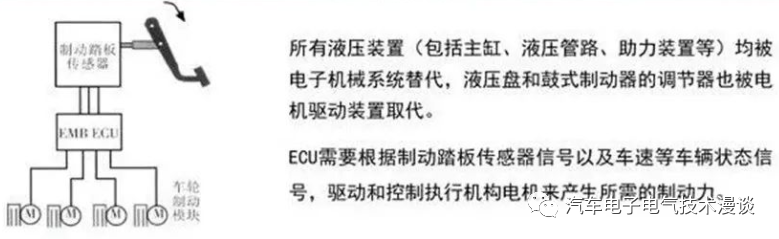
3.电子机械制动系统(EMB) EMB系统主要由踏板模块(传感器)、控制模块(ECU)、驱动执行模块(电子机械制动器)等组成,系统有4套独立的制动系统,分别位于四个轮毂的轮缸处,并且配有独立的控制器,以便实现四轮制动力的独立调节。EMB系统中,所有液压装置(包括主缸、液压管路、助理装置等)均被电子机械系统替代,液压盘和鼓式制动器的调节器也被电机驱动装置取代。其典型EMB系统如下图示。
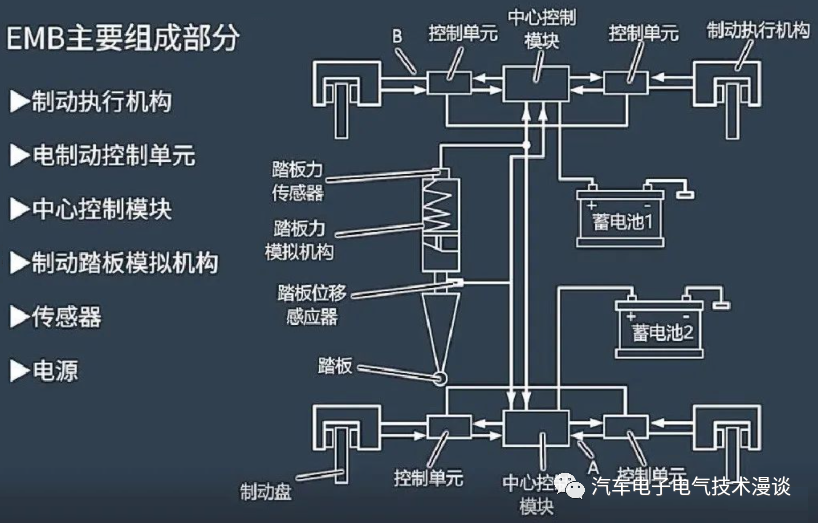
EMB系统的核心部件之一是轮边执行机构系统(电子机械制动器),集成了转角传感器、 扭矩传感器, 结构上又有将电机转动转化为直线运动的机械机构,它通过ECU改变输出电流的大小和方向实现执行电机的力矩和运动方向的改变,通过减速增矩,将电机轴的旋转变换为制动钳块的开合;通过相应的机构或控制算法补偿由于摩擦片的磨损造成的制动间隙变化,同时,电机和驱动机构等都装在制动器上,其结构设计必须十分紧凑,以满足空间要求。轮边工作环境恶劣,是EMB开发难度所在。当前的EMB实现并没有标准形式。
1)通过制动器踏板传感器信号以及车速等车辆状态信号,驱动和控制执行机构的电机来产生所需的制动力,控制制动器制动。

3)接收车轮传感器信号,识别车轮是否抱死、打滑等,控制车轮制动力,实现防抱死和驱动防滑功能;
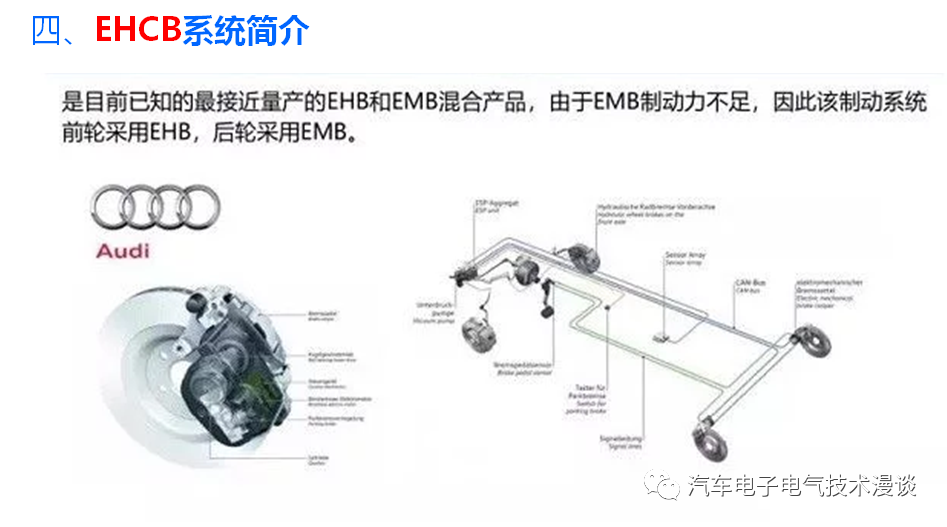
是目前已知的最接近量产的EHB和EMB混合产品,由于EMB制动力不足,因此该制动系统前轮采用EHB,后轮采用EMB,将两种制动系统结合应用可有效发挥两种制动系统的优势。前轮采用EHB系统可实现前轮单轮制动力调节,同时靠装于前轴的EHB实现制动失效备份以满足现行法规要求;后轮采用EMB可缩减制动管路的长度,消除压力控制过程中由于管路过长带来的不确定性,同时能方便地实现电子驻车制动(electrical park brake,EPB)。
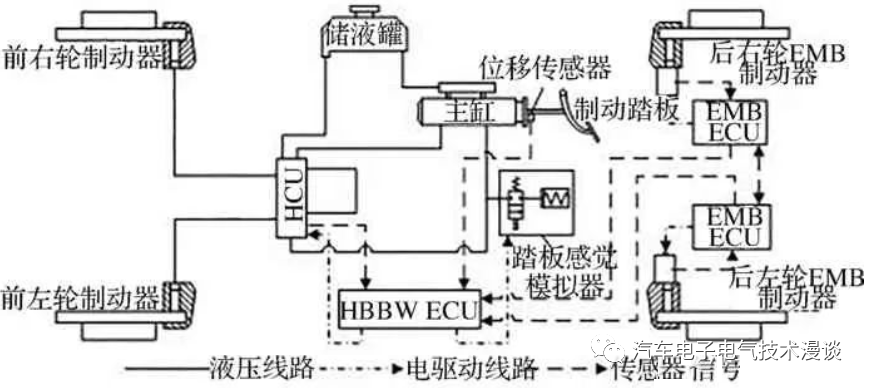
鉴于电子液压制动(electronic hydraulic brake,EHB)系统液压管路复杂且难以集成驻车制动,而电子机械制动(electronic mechanical brake,EMB)很难满足失效备份的需求,提出了一种前轴采用EHB,后轴采用EMB的混合线控制动系统(hybrid brake by wire system,HBBW),研究了EHB的双闭环压力跟随PI控制算法和EMB的三闭环制动力跟随PI控制算法,使其制动力能快速准确地跟随目标值。在此基础上,提出了混合制动系统的制动力精确调节PI控制策略和控制算法,提出将EHB和EMB的制动系统组合形成一种比较理想的混合线控制动系统(hybrid brake by wire system,HBBW),最后基于dSPACE Autobox和CarSim搭建了HBBW系统的硬件在环(hardware-in-the-loop,HiL)试验平台,研究了EHB和EMB的压力跟随PI控制算法,使其制动力能快速准确地跟随目标制动力,进行了HiL测试与算法验证。根据结果得出,混合线控制动系统可有效地协调工作,实现四轮制动力快速、精确调节,来提升车辆制动性能。 提出的HBBW系统总体布置方案如下图所示,系统采用前轮EHB,后轮EMB的结构上的布局。前轮EHB模块由EHB控制器、车轮制动器、液压控制单元(hydraulic control unit,HCU)、制动主缸、踏板感觉模拟器和储液罐组成;后轮EMB模块每个车轮上有一个,由单独的EMB控制器EMB ECU和一个EMB执行器组成。系统装备有一个中央控制器HBBW ECU实现压力控制。
混合线控制动系统总体布置方案 系统工作流程如下:(1)驾驶员踩下制动踏板,主缸中的制动液进入踏板感觉模拟器形成与传统制动系统相同的踏板感觉;(2)HBBW ECU采集制动踏板位移传感器和主缸压力等信息识别驾驶员的制动意图,根据前后轮理想制动力分配曲线)前轮制动由EHB实现,EHB控制器集成于HBBW ECU中,它控制电动泵抽取储液罐中的制动液,向高压蓄能器注入制动液作为高压压力源,通过电磁阀控制制动液流入流出制动器实现压力跟随;(4)后轮制动由EMB实现,HBBW ECU通过CAN向EMB ECU发出制动力控制指令,EMB ECU作为底层控制器驱动EMB执行器实现后轮制动力控制;(5)在HBBW ECU中,还可集成 EBD/ABS/ESP等控制算法。 当系统失效时,启动制动失效备份,如下图所示。后轮EMB不再工作,前轮EHB恢复电磁阀初始状态,踏板感觉模拟器前端电磁阀和增减压电磁阀关闭,两隔离阀打开,电机不再工作。驾驶员通过制动踏板经主缸直接作用于前轮轮缸形成制动力,实现制动。
EHB制动失效备份原理图 该系统既能充分的发挥两种制动系统的优势,又能弥补各自的不足。为提高控制响应速度与精度时,在前轴装EHB,实现制动失效备份以满足现行法规要求;另外,由于后轴EMB所需的制动力矩比较小,现有的12V车载电源系统满足其功率需求。
HBBW在对前后轮进行制动力精确调节之前,需要识别驾驶员的制动行为,下图为HBBW前后轮制动力分配框图。驾驶员踩下制动踏板,位移传感器和主缸压力信号分别采集信号输送给HBBW ECU,HBBW ECU通过对传感器的信号采集分析识别出驾驶员的制动意图,经整车控制算法,根据汽车制动过程中的不一样的需求,如ABS,ESP和EBD等算法开启和关闭给出前后轮的目标制动压力。
HBBW前后轮制动力分配框图 为能精确而快速地调节前后轮制动压力,EHB和EMB应满足: (1)EHB系统达到14MPa的轮缸压力的增压时间小于200ms,超调量小于1%,能较好地跟随正弦调制压力跟随曲线,适应制动系统调压功能; (2)EMB系统达到12kN的制动器制动力的增力时间小于500ms,超调量小于5%,能较好地跟随正弦调制夹紧力跟随曲线,适应制动系统调节夹紧力功能。 以整车EBD控制算法对HBBW制动力调节控制算法做验证,如下图所示。首先是根据制动踏板位移和主缸压力等信息识别驾驶员的制动意图,通过提前设定的主缸压力与前轮轮缸压力之间的关系曲线,给出前轮轮缸的目标压力值p∗(驾驶员目标压力),通过EHB执行器来调节前轮的制动压力。而对于后轮的制动压力则通过后轮的滑移率控制器来调节后轮与前轮之间的相对滑移率。后轮滑移率控制器根据前轮轮速和后轮轮速的差值,输出目标制动器制动力给EMB控制管理系统,调节后轮的制动力的大小,保证前后轮的角速度一致,达到车轮抱死时前后车轮同时抱死的目的,可表示为
为前轮角速度;ωrw为后轮角速度;Kw-p和Kw-i为后轮滑移率PI控制器的参数。

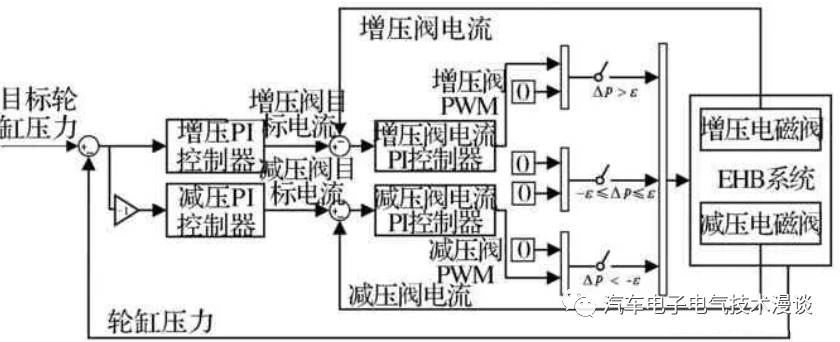
对于EHB系统轮缸压力的控制,重点是对线性增减压阀的控制。所选的EHB系统前轮的增减压阀均为常闭阀,下图为EHB轮缸压力跟随控制算法框图。为防止电磁阀过于频繁动作,设定一个保压压力门限值ε(ε>0),控制过程如下:设p∗为目标轮缸压力,p为实际轮缸压力,则当p-p∗<-ε时,减压阀关闭,控制增压阀提升轮缸压力;当-ε≤p-p∗≤ε时,增减压电磁阀均处于关闭状态;当p-p∗≥ε时,增压阀关闭,控制减压电磁阀,降低轮缸压力。在保证轮缸压力跟随中压力误差较小和减少电磁阀开关频繁的前提下,通过试验标定选取ε为0.05MPa。

EHB轮缸压力跟随控制框图 对线性电磁阀的控制由电磁阀电流环PI控制器和轮缸压力环PI控制器组成,其中轮缸压力环PI控制器根据目标轮缸压力和实际轮缸压力的差值算得增减压电磁阀的目标电流:
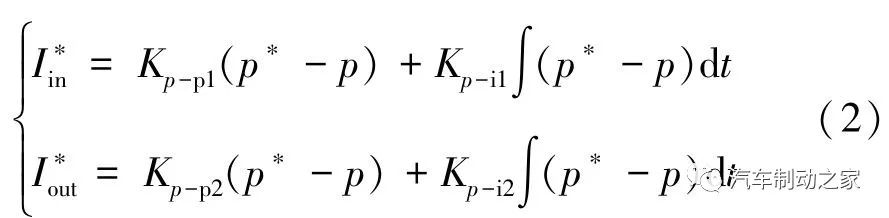
为减压阀目标电流;Kp-p1,Kp-p2,Kp-i1和Kp-i2为压力环PI控制器的参数。 电流PI控制器根据线性电磁阀的目标电流与实际线性电磁阀的电流差值算得调节电磁阀的线圈电压,再换算成PWM控制线性电磁阀开度:
编辑:什么鱼 引用地址:汽车电子T-Booster与ESC耦合制动系统技术解读
2012年10月24日~25日,英飞凌在中国汽车技术研究中心(天津)举办了首届汽车电子开发者大会。本次大会重点强调了正在推广的汽车电子生态圈理念。 英飞凌科技(中国)有限公司中国区汽车电子业务负责人兼事业部高级总监徐辉女士致辞时表示:“汽车电子生态圈,致力于为有外包设计需求的零部件厂商和车厂提供英飞凌所签约的亚太区产业化合作伙伴的电控单元系统方案,同时,英飞凌可以为需求方安排与感兴趣的方案开发方进行直接商谈。电控单元系统方案涉及新能源混合动力/纯电动、车身、汽车安全以及传统动力总成这四大领域和AUTOSAR软件平台。此外,零部件厂商和车厂还可以在生态圈中免费发布方案需求或标书,以竞标的形式寻求性价比最高的合作。” 徐辉强
开发者大会 /
首先是电气化。大量的报道都在讨论电气化,电气化其实就是把电动马达添加到原本仅有汽油机或者柴油机的系统中,而这却为大众市场带来了激动人心的变化。这背后有诸多原因,然而很重要的一点是增加成本的回报率。所谓混合动力系统包含了一个辅助的电动马达,它能帮助实现燃油效率的大幅度的提高。这个马达并不主导驾驶,但是它却能提升传统发动机的能力,使主引擎可以“瘦身”。主引擎体积越小,那么它的功耗则会下降,而效率将得以提升。而这套系统的成本比全电动汽车要少得多。 其次是先进的安全系统。该系统主要以摄像头监控为基础(也有基于或采用雷达功能的系统)以确保驾驶更安全。其中包含了对司机的监控,车道偏离报警,监测汽车盲点或处在危险区域行人等功能。研究表明,80
随着人们对汽车性能要求的逐步的提升,慢慢的变多的汽车电子/电气(E/E)架构系统被集成到汽车中,成为智能交通、无人驾驶、智能城市等更广泛ECO的组成部分。汽车行业自动化水平的大幅度的提高,也为汽车E/E架构的发展带来若干关键机遇。市场研究机构的数据表明,2018年汽车电子/电气架构市场的价值为632亿美元,预计在2018年到2026年期间将以9.9%的复合年增长率增长。这一增长主要归功于汽车、联网汽车以及无人驾驶的电气化程度的逐步的提升。此外,ADAS、DMS、HMI、V2X技术中摄像头、传感器应用的增加对汽车电子/电子架构市场也产生了积极影响。 01 三大汽车E/E架构及演进史 在讨论汽车E/E架构如何演进之前,我们先来看一下过去
电气架构进化的终极目标是什么?答案就在这里~ /
电动汽车是以电力作为动力的,电力是一种非常干净的能源。随着生态环境的不断破坏,利用电力驱动的汽车成为了汽车行业的一种新技术,新产品。电动汽车产业在政府政策的支持,已经取得了一定成绩,也受到普通用户的亲睐。但是其发展中也有一些问题有待解决。随着电子技术、计算机技术的发展,汽车电控技术获得很大发展,特别是在控制精度、控制范围、智能化和网联化等方面有较大的突破。汽车电子控制技术是衡量汽车领先水平的标志。 在全世界汽车芯片短缺和能源危机下,欧美主流汽车厂商都出现不同的程度的减产,传统燃油车的销量也开始下降,新能源汽车销量一直上升,但目前的汽车市场中,燃油车的保有量远超于新能源汽车的保有量。在燃油车产业体量依然庞大的背景下,以德国为代表
近日,德国莱茵TUV大中华区(以下简称“TUV莱茵”)位于上海及广州的汽车电子电磁兼容(EMC)实验室获得中国长城汽车股份有限公司(以下简称“长城汽车”)光束汽车项目在EMC和电气负荷检验测试方面的授权认可。其中,TUV莱茵广州EMC实验室是华南地区唯一一家授权实验室。此次获长城汽车光束汽车项目的认可,证明了TUV莱茵在专业技术人员配备、实验室资质和技术能力、增值服务等方面再次得到国内主流车企的肯定。 TUV莱茵汽车电子EMC实验室喜获长城汽车认可 2019年11月29日,长城汽车与宝马集团合资的光束汽车项目真正开始启动,双方将整合优势资源携手进行纯电动汽车的联合研发和生产,包括未来的MINI纯电动汽车以及长城汽车旗下新产品。这不仅是
EMC实验室喜获长城-宝马合资光束汽车项目认可 /
2016年,汽车业变革对整个制造业链条的影响继续发酵,除了与新能源汽车相关的产业链,随着车联网和智能驾驶技术高达上万亿元的市场潜力快速释放,汽车电子开始成为资本热逐的下一个风口。 2月16日,在停牌百天后,汽车中控系统供应商均胜电子发布定增及重大资产购买预案,称公司拟非公开发行不超过3.6亿股,募集资金总额不超过86亿元。其中,拟以9.2亿美元现金收购美国公司KSSHold-ings,Inc.(下称KSS)并以1亿美元对其增资,另以1.8亿欧元现金收购德国 TS道恩的汽车信息板块业务,两起跨国收购的交易对价折合人民币近80亿元。募资多余部分用于补充被收购公司的流动资金。 瞄准汽车电子潜力的不仅是均胜电子这样的巨头。2月17
如今电子科技类产品成本占到整车成本的30-40%左右,并且这一数字还在稳步上升。这些电子科技类产品不仅包括功能性元件,如 发动机 控制单元、制动系统和传动系统控制装置,也包括了娱乐和导航部件。近来LED技术的使用出现了爆炸式增长,也正好说明了这一点。例如,在欧洲所有新车必须配备日间行车灯,而LED则因为功耗低和效率高的特点成为了首选照明技术。 高效的热管理很重要,是因为LED会不断散发出热量,并且LED的灯罩越来越小。随着亮度和功率的逐步的提升,被紧密排列在一起的LED(如汽车头尾灯)却无法用风扇等来降温。因此可靠性和性能势必会受一定的影响。当LED超过临界结温时,就会出现两个问题。首先,LED会变暗,颜色也会改变。其次,如果温度持续过高,
近日全国乘用车市场信息联席会有关负责人王宏指出,汽车电子技术是汽车的核心技术,汽车工业技术进步和创新的70%源自汽车电子技术的发展。因此,汽车电子产业要跟上时代发展的步伐,一定要制定专项发展规划,鼓励和支持其发展。 汽车电子是指电子技术在汽车上的应用。我国汽车电子业发展起步于上世纪80年代初,由于排放、安全法规的日趋严格使电子燃油喷射系统,制动防抱死系统和安全气囊系统开始在轿车上得到应用,汽车的电子化程度逐年增加,提高了汽车性能和质量,使电子技术与汽车技术相互渗透,形成了机电一体化的汽车电子科技类产品。2004年开始快速地发展,2006~2007年,产业高质量发展进入高峰期。赛迪顾问股份有限公司曾预测,2009年中国汽车电子产业
Littelfuse - 汽车电子电路保护: 市场,标准,应用及解决方案
【电路】汽车电子点火电路 (Electronic car ignition)
解锁【W5500-EVB-Pico】,探秘以太网底层,得捷电子Follow me第4期来袭!
有奖直播 与英飞凌一同革新您的电动汽车温控系统:集成热管理系统(低压侧)
报名直播赢【保温杯】等好礼|TI MSPM0 MCU 在汽车系统中的应用
英特尔 Gaudi2C AI 加速卡现身 Linux 驱动,消息称是中国版
12 月 20 日消息,今年 7 月,英特尔面向中国市场推出了一款 Gaudi2 处理器,主要使用在于加速 AI 训练及推理。据 Phoronix 报道 ...
12月19日,摩尔线程首个全国产千卡千亿模型训练平台——摩尔线程KUAE智算中心揭幕仪式在北京成功举办...
现代世界正逐渐采用更自然的人机界面(HMI)。我们不但可以与智能音箱交谈,还可以在纸张般的电子阅读器上阅读。电子科技类产品已是我们的数字 ...
Achronix提供由FPGA赋能的智能网卡(SmartNIC)解决方案来打破智能网络性能极限
随着人工智能 机器学习(AI ML)和其他复杂的、以数据为中心的工作负载被广泛部署,市场对高性能计算的需求持续飙升,对高性能网络的需求也 ...
芯原的开放硬件平台促进开源软件ECO的发展2023年12月19日,中国上海芯原股份今日宣布与谷歌合作支持新推出的开源项目Open Se Cu ...

嵌入式处理器嵌入式操作系统开发相关FPGA/DSP总线与接口数据处理消费电子工业电子汽车电子其他技术存储技术综合资讯论坛电子百科词云:

 售前客服
售前客服 技术咨询
技术咨询 sales
sales